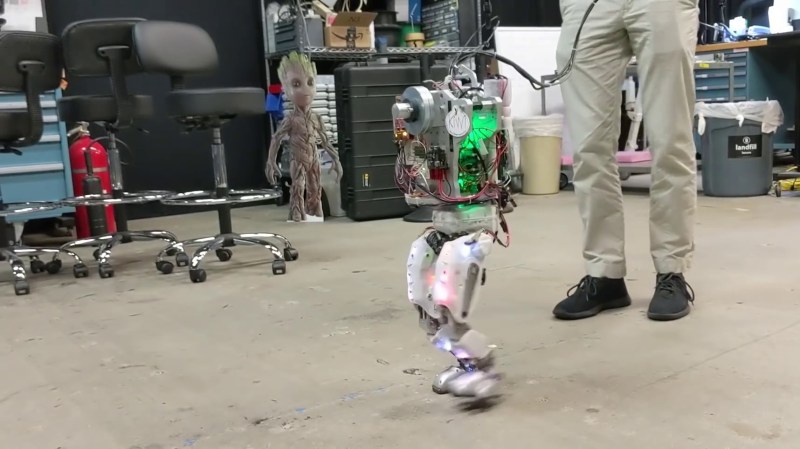
If you’re working on your own bipedal robot, you don’t have to start from the ground up anymore. [Ted Huntington]’s Two Leg Robot project aims to be an Open Source platform that’ll give any future humanoid-robot builders a leg up.
While we’ve seen quite a few small two-legged walkers, making a pair of legs for something human-sized is a totally different endeavor. [Ted]’s legs are chock-full of sensors, and there’s a lot of software that processes all of the data. That’s full kinematics and sensor info going back and forth from 3D model to hardware. Very cool. And to top …read more
 Continue reading Hackaday Prize Entry: Two Leg Robot→
Continue reading Hackaday Prize Entry: Two Leg Robot→